| "Vityaz-D" | |
|---|---|
| Fartygets historia | |
| flaggstat | |
| Hemmahamn | förmodligen baserad i Stillahavsflottan [1] |
| Modern status | opererades |
| Pris och ära | det första helt obemannade obemannade undervattensfordonet som nådde botten av Mariangraven [2] |
| Huvuddragen | |
| fartygstyp | robotkomplex, djuphavsfarkost, bottenkommunikation och navigationsstation [3] |
| Projektbeteckning | Vityaz-D [3] |
| Projektutvecklare | Central Design Bureau "Rubin" , Foundation for Advanced Studies [3] |
| Chefsdesigner | Dmitrij Semenov [4] |
| Maximalt nedsänkningsdjup | 12 tusen meter [3] |
| Autonomi för navigering | Ja |
| Besättning | 0 |
| Mått | |
| Maximal längd (enligt design vattenlinje ) |
5,5 m |
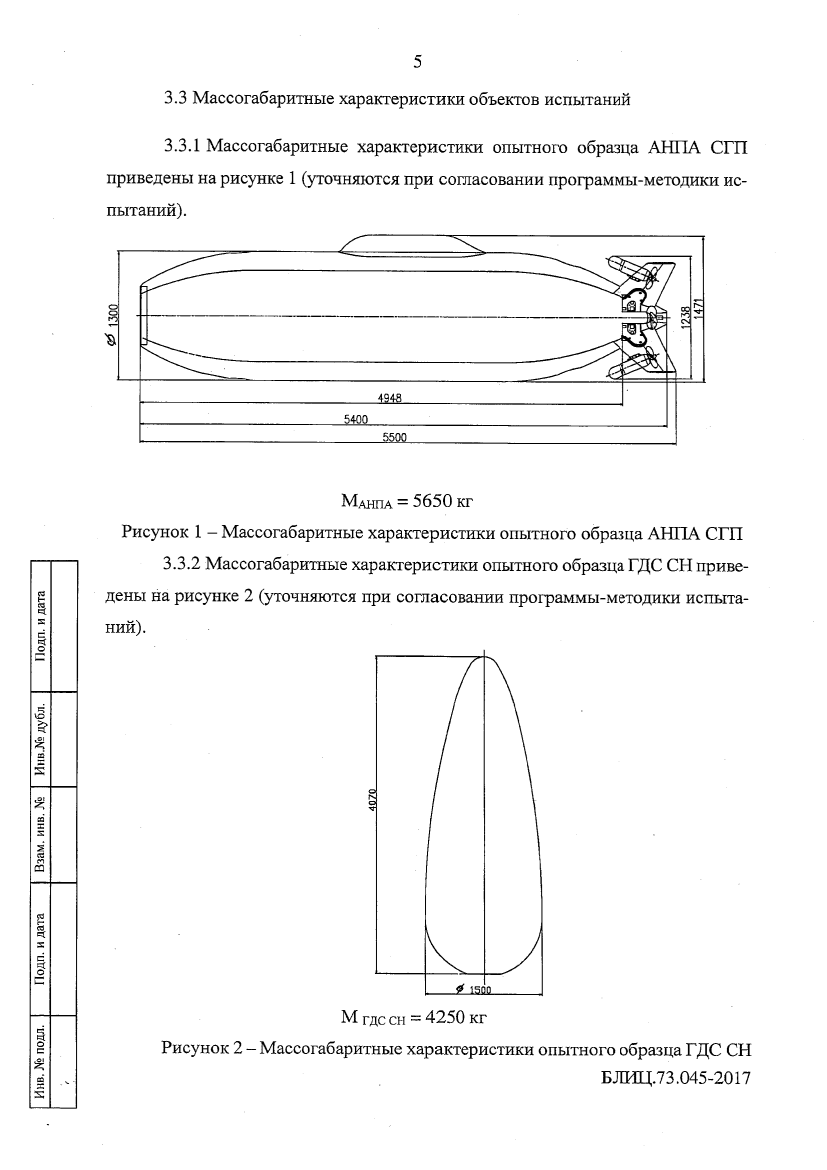
| Skrovbredd max. | 1,3 m |
| Höjd | 1,471 m |
| Power point | |
| 4 framdrivningar och 10 propeller | |
| Mediafiler på Wikimedia Commons | |
Vityaz-D är ett ryskt autonomt obebodt undervattensfordon . Världens första autonoma obemannade fordon som dök till botten av Marianergraven (djup 11 022 meter). Tidigare har andra obebodda fordon (till exempel den japanska " Kaiko " eller den amerikanska " Nereus ") gått ner till botten av Mariana-graven , men till skillnad från "Vityaz-D" var de inte helt autonoma [5] [2 ] .
Namnet på det robotiserade djupvattenkomplexet "Vityaz-D" gavs till minne av det sovjetiska forskningsfartyget " Vityaz ", som 1957 lyckades bestämma Marianagravens maximala djup - 11 022 meter [3] .
Rubin Central Design Bureau har projekt utformade för att skapa robotiserade (obemannade) undervattens (inklusive under is) olje- och gasutforsknings-, borr- och produktionskomplex, inklusive kraftmoduler och transportplattformar. Denna riktning är förenlig med det statliga programmet "Socioekonomisk utveckling av Ryska federationens arktiska zon under perioden fram till 2025". . Inom denna ram skapades ett antal enheter, till exempel "Cembalo", som kan fungera på djup på upp till 6 tusen meter, "Juno", "Amulet" och andra, till exempel en målsimulator för ubåten "Surrogat". Gradvis gick Central Design Bureau "Rubin" vidare till skapandet av utrustning för superdjup (upp till 12 tusen meter) och "Laboratoriet för marina robotsystem" skapades i byrån [6] . Det första sådana komplexet var Vityaz-D, som fick sitt namn till minne av det sovjetiska forskningsfartyget Vityaz, som först bestämde det maximala djupet för Mariana Trench 1957 . "D" i namnet indikerar enhetens funktion som demonstrator [3] .
Viktor Litvinenko blev chef för projektgruppen. Utländska deltagare bjöds inte in till projektet, men de informerades om det pågående arbetet [3] . Rubin var ansvarig för hela cykeln för att skapa apparaten: dess design, tillverkning och djuphavstester i avlägsna områden i Stilla havet [6] . I samarbete med Rubin, Shtil Hydrocommunication Research Institute, det statliga vetenskapliga centret vid Central Research Institute of Robotics and Technical Cybernetics , Institutet för marinteknologiska problem i den ryska vetenskapsakademins Fjärran Östern och andra organisationer arbetade med detta projekt [6] .
Det var ursprungligen planerat att monteringen av apparaten skulle slutföras i januari-februari 2018, våren 2019 gjordes fabrikstester i Kronstadt -området , den första testningen på Svarta havet var tänkt och till sommar-höst övergången till tester i Stilla havet , där skaparna av enheten var planerad att anlända till hösten 2019 [3] .
Rubin Central Design Bureau, i sin årsrapport för 2015, tillkännagav det utvecklade projektet av Vityaz djuphavsdränkbar, utformad för att utföra forskningsarbete på ett djup av 11 000 meter. Under arbetet 2017 gjorde Rubin Central Design Bureau en begäran om tillverkning och leverans av ett speciellt utomhusbelysningssystem för Vityaz-D djuphavsdränkbar, för vilken det maximala kontraktspriset var 15 miljoner rubel [7] .
Kölläggningsceremonin för Vityaz-D undervattensbåten på monteringsslippen för den experimentella produktionen ägde rum den 30 november 2018 [7] . Vityaz-D-projektet presenterades först öppet vid Eastern Economic Forum [3] .
Vityaz-D-apparaten kan fungera autonomt utan extern kontroll, inklusive i närvaro av hinder [6] . Projektet innebär möjlighet till ett maximalt dyk till 12 000 meter. Trots det maximala kända djupet av Mariana Trench, planeras utforskning av okända områden i området för " Challenger Spot ". Endast ett fåtal människor har dykt ner i denna plats och dess djup, och inte ett enda land har genomfört storskaliga studier. Anordningens uppgift var att studera området inom en radie av 150 kilometer, där djupet är okänt [3] .
Vityaz-D-komplexet inkluderar, förutom ett direkt djuphavsautonom obebodd nedstigningsfordon, en bottenkommunikations- och navigeringsstation och kontrollrumsutrustning. Under driften av apparaten utbyts information mellan drönaren och bärarfartyget genom en hydroakustisk kanal i realtid [5] . Manövreringsanordningen är en genomtränglig noll-flytkraftsstruktur , dess kraftbaser är gjorda av titanlegeringar. De yttre konturerna är gjorda av sfäroplastisk , vilket gjorde det möjligt att kompensera för apparatens övervikt och ge den en strömlinjeformad form. För rörelse använder enheten fyra marscherande och tio propellermotorer [6] .
Vityaz-D-utrustning inkluderar ekolod , hydroakustiska navigerings- och kommunikationshjälpmedel, sidoavsökningsljud , externa videokameror, belysningsenheter och speciell forskningsutrustning. Detta gör det möjligt att utföra undersökning-sökning och batymetriska undersökningar på givna djup, att utföra provtagning av det övre lagret av bottenjorden, ekolodsundersökning av bottentopografin och att mäta den marina miljöns hydrofysiska parametrar [6] .
Den största fördelen med undervattensfarkosten är att bedriva vetenskaplig forskning i djupvattenområden av ett stort område [7] . Kontrollsystemet använder element av artificiell intelligens , [8] vilket gör att enheten självständigt kan kringgå hinder, ta sig ut ur ett begränsat utrymme och lösa andra manövreringsuppgifter. Detta är dess skillnad från andra enheter som tidigare störtade i Mariana Trench. Det är den ryska apparatens autonomi som skiljer den från den amerikanska " Nerei " och den japanska " Kaiko " som tidigare hade störtat i Mariangraven [2] [6] .
Apparatens massa är 5650 kg. Enheten har formen av en torped. Diameter - 1,3 m, höjd - 1,471 m, längd - 5,5 m [9] . Enheten kan motstå tryck upp till 1000 atmosfärer [8] .
Den 8 maj 2020 sänktes en djuphavsbottenstation som har en kabelanslutning med fartyget. Efter det, från styrelsen för Stillahavsflottans räddningsfartyg " Fotiy Krylov ", började den autonoma obebodda apparaten "Vityaz-D" dyka in i Mariana-graven. Den 8 maj, klockan 22:34 Moskva-tid, slog den botten och under studien registrerades ett djup på 10 028 meter [6] [10] [5] . Under detta dyk låg enheten på botten i mer än 3 timmar, där den utförde ytkartering, foto- och videoinspelning av havsbotten, tog fram parametrarna för den marina miljön och installerade en vimpel på botten av Mariana Trench i ära av 75-årsdagen av segern i det stora fosterländska kriget [2] [1] [5] .
Flera experiment är planerade som en del av projektet, och dyket den 8 maj var den första etappen i denna serie. En av uppgifterna var att kontrollera de lösningar som konstruktörerna valt [2] .
{kind=link}