Begränsad slirdifferential (även: begränsad slirdifferential (LSD), begränsad slirdifferential , självlåsande differential, begränsad slirdifferential ) är en differential , vars mekanik, på grund av det strukturellt inneboende ökade inre motståndet mellan vissa roterande delar, tillåter t.ex. en differential utan några - eller styrande åtgärder utifrån för att självständigt utjämna vinkelhastigheterna för de drivande och drivna länkarna upp till deras fullständiga ömsesidiga blockering och omvandling av hela differentialen till en direkt transmission.
Man bör komma ihåg att i den engelska litteraturen hänvisas dessa skillnader till som "LSD (Limited-Slip Differential)", det vill säga "limited slip differential" (slip), och denna term definierar inte den fysiska principen för drift av enheten, närvaron av friktion, motstånd, men också närvaron / frånvaron av differentialkontroll, etc. Endast funktionen att blockera en okontrollerad skillnad i frekvensomriktarnas vinkelhastighet ("slip") spelar roll. "Begränsad slirning" innebär vanligtvis en viss förutbestämd gräns för skillnaden i vinkelhastigheter, över vilken låset börjar fungera. I vissa implementeringar kan blockering användas förebyggande, det vill säga även innan axelaxlarna har en skillnad i vinkelhastigheter.
Den största fördelen med en begränsad intern motståndsdifferential (LDR) kan ses genom att överväga fallet med en konventionell (eller "öppen") differential, där ett hjul inte har någon kontakt med vägen alls. I det här fallet kommer det andra hjulet i kontakt med vägen att förbli stillastående och det första hjulet som inte är i kontakt med vägen kommer att rotera fritt - det överförda vridmomentet kommer att vara lika på båda hjulen, men kommer inte att överskrida tröskelvärdet för det moment som krävs för fordonets rörelse, och därför kommer fordonet att förbli stillastående. I konventionella bilar som kör på asfaltvägar är denna situation osannolik, och därför är en konventionell differential ganska lämplig för sådana bilar. När du kör under svårare förhållanden, som när du kör i lera eller terräng, inträffar dessa situationer, och närvaron av en differential med ökat inre motstånd gör att du inte kan stoppa rörelsen. Genom att begränsa skillnaden i hjulens vinkelhastigheter överförs det användbara momentet så länge som minst ett av hjulen har dragkraft.
Blockeringskoefficienten är den viktigaste utvärderingsegenskapen för någon RPA. I informationsmaterial om RPA kan denna koefficient uttryckas på två sätt och något skilja sig åt i betydelsen av tolkning, även om det i båda fallen betyder samma sak, bara ur olika synvinklar.
I utländsk teknisk litteratur uttrycks KB vanligtvis som ett procenttal i tiotals procent inom intervallet 20 % och över. Siffran anger bredden på området för relativ vridmomentfördelning mellan hjulen/axlarna som täcks av en specifik RPA från den statiska (korrigerad för dess möjliga asymmetri) inbäddad i differentialen till den maximala nivån på 100/0, inom vilken RPA kan ge ömsesidig blockering. Denna definition faller under den engelska termen Locking Effect (”blocking effect”). I ryskspråkig teknisk litteratur uttrycks KB som ett tal från 2 och högre (vanligtvis utan decimalbråk), vilket indikerar den maximala möjliga skillnaden i vridmoment (skillnad i dragkraft) på hjulen/axlarna, inom vilka en given RPA kan tillhandahålla sin ömsesidiga blockering. Denna definition av KB motsvarar den engelska termen Torque Bias (”torque shift”).
Även om båda begreppen CB innebär olika beräkningsformler, kan absolut vilken RPA som helst uppskattas korrekt av någon av dem. Samtidigt kan vart och ett av de två KB-värdena korreleras med den övergripande uppskattade indikatorn, och det finns alltid en en-till-en-överensstämmelse mellan båda värdena. Så till exempel betyder värdet på KB = 50% och KB = 3 samma sak i båda fallen: att RPA med den specificerade KB tillåter omfördelning av vridmoment mellan hjulen / axlarna i ett förhållande på högst 75/ 25, vilket å ena sidan ger 50 % av hela området för möjlig omfördelning av det effektivt använda vridmomentet (75-25=50), och å andra sidan ger en 3-faldig skillnad i möjlig dragkraft (75/25) =3). Det numeriska (inte procentuella) värdet på KB är kanske mer intuitivt här, särskilt eftersom det förutom sin huvudsakliga betydelse innebär en liknande skillnad i den tillåtna vidhäftningskraften för hjul/axlar till ytan, vilket i samma fall KB = 3 betyder att den maximala effektiva användningen av motorkraft på denna RPA endast är möjlig om greppkraften för varje hjul med vägytan skiljer sig inte mer än tre gånger.
En enkel (gratis) differential tillåter dig inte att få någon skillnad i effektivt använda vridmoment på de drivna länkarna, här är skillnaden mellan dragkraften för båda hjulen / axlarna praktiskt taget noll i alla lägen, KB för en sådan differential är 0 % eller 1. Direkt växellåda eller blockerade differentialer gör att alla effektivt använda vridmoment kan realiseras på vilken driven länk som helst, här kan vilket hjul/axel som helst ge all dragkraft vid noll dragkraft på det andra hjulet/axeln, och KB i detta fall är 100% eller oändligt.
RPA kan ha två övre KB-värden, ett för varje kraftben. Detta är möjligt i fall av en asymmetrisk skillnad, när designbyrån får en korrigering för asymmetri - det vill säga de övre värdena på designbyrån för var och en av sidorna skiljer sig från varandra genom skillnaden i förhållandet av de utplacerade vridmomenten (till exempel i en asymmetrisk bakre kamkorshjul DPVS på en GAZ-66-lastbil, som bryter ned vridmomentet på hjulen i förhållandet ≈(60/40), värdena för KB för höger och vänster hjul är 3.1 respektive 2.1). Och detta är möjligt i symmetriska differentialer, när det är strukturellt tillåtet av mekaniken i låsoperationen (till exempel i den symmetriska snäckväxeln Torsen Type-1 RPAS, kan olika värden på KB realiseras genom olika skärvinklar av tänderna i varje satellit-kugghjulspar).
Vanligtvis är CB för en viss RPA dess maximala CB. Samtidigt har varje RPA ett värde av den så kallade initiala KB, som vanligtvis inte deklareras.
Denna term betyder skapandet i RPA av internt motstånd mot den ömsesidiga rotationen av de drivna länkarna i statik, det vill säga i frånvaro av något vridmoment som appliceras på differentialen. Värdet på förspänningsnivån bestäms av den kraft som krävs för att växla (rotera) en differentiell driven länk när drivlänken är stationär. I en fri differential är förspänningsnivån nära noll. Förspänningen, om någon, "fungerar" alltid, oavsett om RPAS är belastad med dragkraft eller bromsmoment eller inte. Förekomsten av förspänning är inte en förutsättning för driften av RPA.
Den så kallade "förspänningskopplingen" innebär en viss anordning inuti RPA:n som utför ovanstående funktioner och gör det svårt för de differentialdrivna växlarna att rotera sinsemellan. Utformningen av denna enhet har inte en universell form och kan vara vilken som helst på olika RPA. Vanligtvis är dessa distansfjädrar av olika former, kompletterade med distansringar.
Två typer av RPA används vanligtvis i personbilar:
Differentialer av båda typerna tillåter viss strukturellt programmerad skillnad mellan vridmoment (i det första fallet) eller vinkelhastigheter (i det andra fallet), men lägger en mekanisk begränsning på förekomsten av en stor disproportion.
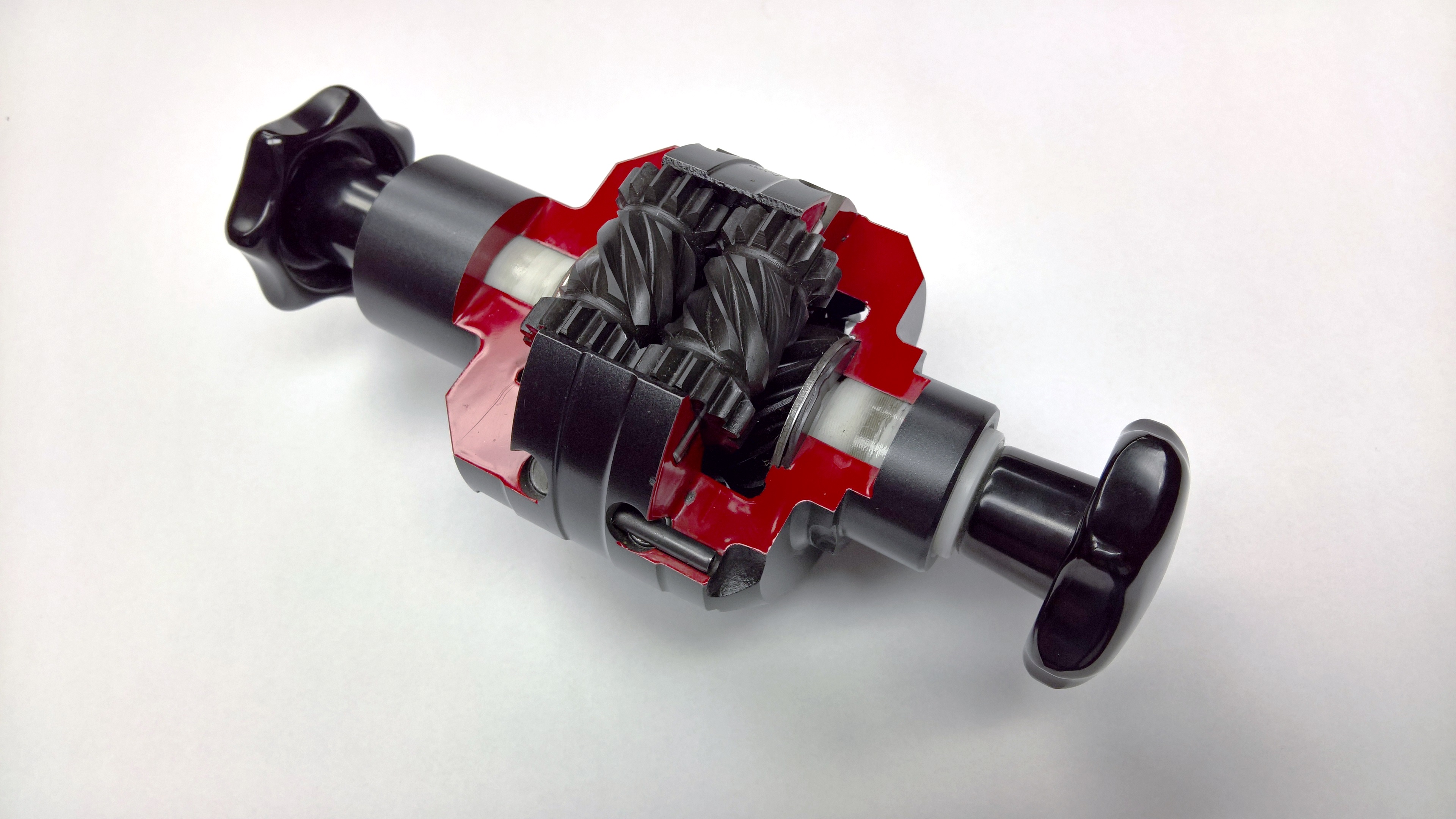
Strukturellt kan skruvlåsta differentialer göras på basis av vilken platt enkelrads- eller dubbelrads planetmekanism som helst av SHS- eller SVE - scheman med parallella axlar för satelliter, som i sin tur kan vara antingen enkla eller parade i varandra. Det kommer att finnas två egenskaper som är gemensamma för alla typer av prestanda: användningen av cylindriska spiralformade kugghjul i alla ingreppspar och frånvaron av faktiska satellitaxlar som delar. Helical gear , som sådan, används inte här, och den vanligaste termen kommer enbart från den visuella likheten mellan differentialdreven och skruven, särskilt i motsats till dess huvudväxlar. Och satellitväxlarna här roterar inte på axlar, utan i cylindriska fickor frästa i differentiallådan/hållaren. Idén med blockering bygger på det faktum att vid spiralutväxling under belastning uppstår axiella krafter som tenderar att trycka båda kugghjulen längs sina axlar i motsatta riktningar från kontaktplanet, och här används denna egenskap främst i par av sammankopplade satelliter , som för detta får viss axiell rörlighet. Under dragkraft, när man vrider eller slirar hjulet, vilar de roterande satelliterna inkilade i sina fickor mot ändarna av differentialhuset, på grund av vilket de bromsas och självinriktar vinkelhastigheterna för de drivna växlarna. Kilningen av satelliter är desto starkare, desto högre vridmoment som överförs av dem, men själva blockeringskoefficienten bestäms av lutningsvinkeln för ingreppständerna och friktionsegenskaperna hos satellit-/huskontaktparen. För att förstärka den självbromsande effekten i dessa differentialer används vanligtvis tre par satelliter mer än det minimum som krävs för en platt planetmekanism - nämligen från fyra till sju par. Och för att förstärka friktionseffekten vid kontaktpunkterna mellan satelliternas ändar och differentialhuset kan distansskivor av ett material som skapar ökat motstånd mot friktion användas. När det gäller enstaka satelliter är differentialens funktion i grunden likartad, med den enda skillnaden att här är inte bara satelliterna, utan även differentialens centrala växlar involverade i självbromsningen.
På grund av det faktum att spiralformade kugghjul kan användas på plana planetväxlar av vilken form och form som helst, kan differentialer baserade på dem göras med nästan alla givna utväxlingsförhållanden i varje par master-slavlänkar. Följaktligen kan sådana differentialer vara både symmetriska och asymmetriska och kan användas i transmissionen som både mellanhjul och mellanaxel. Förspänning används aktivt på dessa differentialer, och blockeringsmomentet här skapas i dragläge även i frånvaro av en skillnad i vinkelhastigheter vid utgången. Men uteslutande på spiralutväxling är höga värden på låskoefficienten inte tillgängliga (vanligtvis < 3), och för att förstärka effekten kan sådana differentialer kompletteras med friktionspaket som skivlåsta differentialer.
Skruvlåsdifferentialer är mycket vanliga idag. Deras huvudsakliga användningsområde är sport- och racingbilar. De används också som trimning för en liten förbättring av öppenheten i vägbilar. Men på riktiga terrängfordon används de vanligtvis inte. De mest kända proverna är från det brittiska företaget Quaife Engineering och amerikanska Torsen NA Inc. . I det första fallet kallas differentialen - Quaife . I det andra fallet är det de så kallade Torsen Type-2 och Torsen Type-3 .
Strukturellt är alla masklåsdifferentialer gjorda på basis av enkla rumsliga planetmekanismer i SVS- schemat med satelliter på korsande axlar . Visuellt ser sol-satellitkopplingsparen här ut som en snäckväxel , där snäckhjulets axlar och själva masken också är vinkelräta mot varandra och inte skär varandra. Både satelliter och drivna växlar kan fungera som en snäcka och ett snäckhjul, och det finns utvecklingar av ett snäcklås med båda alternativen för att fördela roller mellan växlarna. Idén med blockering bygger på det faktum att en snäckväxel kännetecknas av självbromsning i de fall kraften riktas från snäckhjulet till masken, som är desto starkare desto större lutningsvinkeln på snäcktänderna är. till sin rotationsaxel.
Även om snäckspärrdifferentialen är mest känd i den variant som utvecklats av amerikanska Torsen NA Inc. , - den så kallade Torsen Type-1 - utvecklingsbolaget självt av någon anledning undviker termen "snäckväxel" när de beskriver sin differential. Växeln här deklareras som spiralformad på korsande axlar, men inte bara spiralformad, utan med några specifika, utvecklade av Torsen själv och patenterade av dem Invex ™ tandform , som faktiskt är en privat version av evolvent växel . I den ryskspråkiga ingenjörslitteraturen tror man att i Torsen Type-1 spelas maskars roll av drivna kugghjul, och rollen som maskhjul är satelliter. Förklaringen till detta härrör från den olika lutningsvinkeln för den spiralformade skärningen på de drivna kugghjulen och satelliterna. Satellitens ovanliga treradiga form med cylindrisk växling längs kanterna och spiralformad växel i mitten förklaras enbart av det faktum att det, på grund av layouten med korsande axlar, är strukturellt omöjligt att organisera genom samma kugghjul som skär den samtidigt inkoppling av både satelliter med drivna växlar och satelliter sinsemellan, och för att öka det interna motståndet hos differentialen, är denna funktion irrelevant. Båda drivna kugghjulen har här med-riktad skärning av tänder och viss minimal axiell rörlighet, vilket, liksom i fallet med skruvlåsta differentialer, är nödvändigt för att växla båda kugghjulen längs axeln under belastning, bara i detta fall inte för kontakt med bostäder, men för deras ömsesidiga självbromsande varandra, vilket ger ett betydande bidrag till den totala ökningen av inre motstånd. Momentkänslig differential. Blockeringskoefficienten i olika versioner är 3-6. Differentialen är visuellt och kinematiskt symmetrisk, och i fallet med en interaxeldifferential användes den på modifieringar av AWD -bilar, ursprungligen framhjulsdrivna. Generellt sett är Torsen Type-1 en av de mest kända RPA-modellerna. Den användes flitigt i WRC- och Formel 1-racingbilar från olika år, både som mellanhjul och som interaxel. Och på landsvägsbilar har det blivit en helt otvetydig association med fyrhjulsdriftssystem från Audi – Quattro – även om Audi har använt andra alternativ under den senaste tidens utveckling. Bland terrängfordon är Hummer H1 en välkänd bärare av denna RPA .
De riktiga snäcklåsade differentialerna med höga (i storleksordningen 10 och ännu högre) låsningsförhållanden var amerikanska och tyska konstruktioner för terränglastbilar. I det här fallet antog designen av RPVS-planetmekanismen trippellåsta satelliter, varav två satelliter var maskar och en var ett maskhjul. Dessutom var drivna växlar snäckhjul, och totalt fanns det 8 snäckor och 6 snäckhjul av två storlekar i differentialen. De huvudsakliga försöken med massanvändning av dessa RPA:er inträffade under förkrigsåren. I Sovjetunionen testades denna typ av RPA efter kriget, både i form av troféer från Rheinmetall-Borsig AG , och i form av hemutvecklingar av en "förbättrad" design baserad på den tyska. Inga data finns tillgängliga för specifika amerikanska och tyska transportörer, även om snäcklåsade differentialer tros ha varit vanliga på olika terräng- och stenbrottslastbilar och traktorer. I Sovjetunionen är den enda mer eller mindre massbäraren Ural-375D . Modern användning är förmodligen noll.
Strukturellt består en skivlåst differential alltid av en planetmekanism enligt SHS -schemat på koniska växlar, kompletterad med ett par koniska miniatyrfriktionskopplingar och ett par flerplåtsfriktionspaket placerade längs differentialens axel på båda sidor mellan de drivna kugghjulen och huset. Några av friktionsskivorna här är i ingrepp med differentialhuset, och några är kopplade till en konformad miniatyrkoppling, som var och en passar ihop med sin egen drivna växel (sol). Idén med blockering är baserad på det faktum att under belastning uppstår axiella krafter i de koniska kugghjulen, som tenderar att trycka isär de växlade kugghjulen från varandra, och till skillnad från en fri differential, där de försöker utjämna denna effekt, är det just på grund av det att friktionspaketen mellan de drivna kugghjulen komprimeras och differentialhuset, vilket i sin tur leder till inriktning av vinkelhastigheterna. Förutom koniska kopplingar och friktionspaket används ofta en distansfjäder här för att förstärka effekten, installerad mellan de drivna kugghjulen. Och för att förstärka effekten har dessa differentialer vanligtvis inte två, utan fyra satelliter på den korsformade bäraren.
Utvecklingen av sådana skillnader har varit känd sedan förkrigstiden - de amerikanska företagen LeTurno-Westinghouse och Borg Warner var engagerade i dem. Differentialer fick sitt moderna utseende och skivlås på 60-talet, när relativt pålitliga friktionsmaterial dök upp, vilket gjorde det möjligt att göra hela systemet kompakt och lämpligt för bilar. Idag används de som tväraxlar i de bakre drivaxlarna på både sport- och terrängfordon. Pålitlig, men kan kräva justering över tid.
Strukturellt finns det två alternativ. I ett fall är en kamkoppling , bestående av två kamskivor och en mellanavskiljare med krackare , placerad mellan de båda drivna kugghjulen av en fri differential. I det andra fallet har differentialens planetväxel inga växlar alls: separatorringen fungerar som differentialens ersättningsbärare, satelliterna är kex, och de drivna växlarnas roll utförs av två kamskivor eller ringar med en vågig profil av ytan som passar ihop med separatorn. I båda fallen är idén om blockering baserad på det faktum att med en viss skillnad i vinkelhastigheterna för de drivna länkarna, kilas klackarna mellan kamskivorna eller ringarna och blockerar nästan omedelbart differentialen. Blockering här fungerar bara på skillnaden i vinkelhastigheter. Upp till ett visst värde av denna skillnad fungerar differentialen som en fri, när den når den blockeras den omedelbart och det spelar ingen roll om den är belastad med vridmoment eller inte. Det finns inget övergångssätt för partiell blockering mellan de fria och blockerade tillstånden.
Den första kända utvecklingen av kamdifferentialer är förmodligen av Ferdinand Porsche . Det var hans differential som gick i serie på KdF-Kübelwagen- maskiner . Idag används självlåsande kamdifferentialer främst som mellanhjulsdifferentialer i terrängfordon och i militär utrustning (pansarförare etc.).
Strukturellt sett är kullåsta differentialer ett slags ersatz planetväxel i det symmetriska SHS- schemat . Formellt har de varken växlar eller satelliter i sin design, men i själva verket är funktionerna hos deras beståndsdelar och den allmänna principen för deras funktion identiska med designen och funktionsprincipen för alla verkliga planetdifferentialer, och låsmekaniken bestäms genom ett ökat inre motstånd mot arbete, som i andra typer av självlåsande differentialer. I rollen som satelliter används här kulor, som är tätt packade i öglor i differentialens hölje (bärare) och som, likt riktiga satelliter, samtidigt är i kontakt med varandra och med ett par drivna ersatzväxlar (två solar). Med en liten skillnad i vinkelhastigheter rör sig bollarna, som trycker varandra, i det ögla spåret i en eller annan riktning, vilket ger differentiell rotation av hela strukturen. När en viss nivå av skillnad i de drivna växlarnas vinkelhastigheter (slirning) uppnås kan kulorna inte bibehålla den (skillnaden), på grund av friktion bromsar de själv i sina spår och skapar därigenom en blockerande effekt.
Denna design är föga känd i den globala bilindustrin och dess distribution är troligen begränsad till Ryssland och Ukraina. De mest kända kullåsta differentialerna är Krasikov Automatic Differential och Nesterov Automatic Differential.
Strukturellt består differentialen av en enkel planetmekanism för absolut vilken krets som helst och en viskös koppling som förbinder två av dess länkar (vilka som helst två kraftförsörjnings-/borttagningsaxlar). Den viskösa kopplingen kan placeras både inuti differentialen och förbinda två drivna länkar, eller utanför och förbinda de drivande och drivna länkarna (placeringen av den viskösa kopplingen påverkar inte den grundläggande driften av hela systemet). Idén med blockering är baserad på egenskaperna hos en viskös koppling för att utjämna vinkelhastigheterna för dess två länkar på grund av egenskaperna hos en dilatant vätska. Blockering utlöses endast av skillnaden i vinkelhastigheter. 100 % blockering är tillåten under en kort tid. Övergångslägen används också aktivt.
Viskösa RPA:er är mindre effektiva än de tidigare nämnda mekaniska RPA:er eftersom de avleder energi. I synnerhet resulterar varje permanent belastning som värmer vätskan inuti kopplingen i en permanent permanent förlust av "differentiell effekt". [ett]
Denna RPA ska inte förväxlas med användningen av en viskös koppling i så kallade fyrhjulsdriftsystem på begäran .
I differentialer av denna typ roterar gerotorpumpens kropp på ena sidan , och på den motsatta sidan roterar en axel kopplad till ett kugghjul inuti pumpen. När det finns en skillnad i rotationsfrekvenserna för huset och växeln, komprimerar pumpen arbetsvätskan i pumpens inre kavitet. Detta säkerställer överföringen av vridmoment till maskinens hjul, som har ett starkare grepp. Pumpbaserade system har övre och nedre tryckgränser och intern dämpning för att undvika hysteres . De senaste systemen med gerotorpumpar har datorstyrd effekt, vilket ger större rörlighet och eliminerar svängningar.
Utvecklingen av elektroniska system i bilar har gjort det möjligt att kontrollera blockeringen av axelaxlarna med hjälp av elektroniska styrenheter (ECU). Dessa system använder nödvändigtvis olika sensorer.
Det första steget var användningen av låsningsfria hjul (ABS) sensorer för att bestämma skillnaden i vinkelhastigheten för de glidande hjulen och sedan tvinga användningen av bromssystemet att individuellt sakta ner hjulet som roterar i för hög hastighet - och, därigenom omfördela momentet mot det motsatta hjulet genom den fria differentialen . Funktionen hos en självlåsande differential i sådana fordon imiteras, själva differentialen förblir klassiskt fri, och därför är en sådan lösning ganska billig, försämrar inte bilens parametrar och kräver inget speciellt underhåll. Sådana system har kollektivt kallats " anti-halk ". Faktum är att de är en mer avancerad version av ABS-systemet, som fungerar inte bara under inbromsning, utan även under rörelse och acceleration. Används även som en del av ett mer globalt system för att "stabilisera" bilkarossen på vägen vid sladdförhållanden. Dessa system är dock begränsade av bromssystemets prestanda, benägna att överhettas vid kontinuerlig drift och efterföljande förlust av effektivitet. På fullfjädrade terrängfordon används vanligtvis inte.
Det andra steget var införandet av elektroniska styrsystem med friktionskopplingar implementerade på varje axelaxel. Sådana kopplingar kan vara öppna vid körning med ungefär lika vinkelhastigheter, eller vice versa, stängda för konstant vridmomentöverföring liknande FullTime 4WD, men när elektroniken avgör slirsituationen, och även för att förhindra det, reduceras de nödvändiga kopplingarna med en beräknad kraft, som överför mer vridmoment till en mindre rörlig axel. Den används till exempel i Haldex-4, VTM-4-system. De kan implementeras både med hjälp av elektriska kopplingar och hydrauliska, för vilka en elektrisk pump används.
Det tredje steget i utvecklingen av sådana differentialer är den så kallade. " aktiva differentialer ", där istället för att blockera tillförseln av vridmoment, används konstant styrning av fördelningen av dragkraft mellan axelaxlarna. I ett antal implementeringar, till exempel Honda SH-AWD, är den bakre differentialen implementerad endast funktionellt, utan den mest klassiska differentialmekaniken, och förlitar sig helt på elektronisk styrning av dragkraft och bakhjulshastighet. I detta fall används hela momentet som överförs till denna axel, utan bromsförluster, det omfördelas endast mot den mindre slirande axelaxeln. Samtidigt blir det möjligt att öka styrbarheten vid svängning, på grund av överföringen av ökat vridmoment till den yttre axelaxeln, och även med en ökning av vinkelhastigheten större än normalt, på grund av en växellåda med ett ytterligare ökande antal. Om någon av sensorerna som används av sådana system misslyckas, stannar drivningen till axeln eller funktionen minskar. Dessutom kan systemet stänga av sig själv, till exempel vid överhettning.
{kind=link}
{kind=link}
{kind=link}