Mars-3
Den stabila versionen checkades ut den 17 augusti 2022 . Det finns overifierade ändringar i mallar eller .| Mars-3 | |
|---|---|
| Tillverkare | NPO dem. Lavochkin |
| Operatör | Sovjetunionens rymdprogram |
| Uppgifter | utforskning av Mars från omloppsbana och yta |
| Satellit | Mars |
| startplatta | Baikonur |
| bärraket | Proton-K / Blok D |
| lansera | 28 maj 1971 18:26:30 MSK |
| Går in i omloppsbana | november 1971 |
| Deorbit | 23 augusti 1972 |
| COSPAR ID | 1971-049A |
| SCN | 05252 |
| Specifikationer | |
| Vikt | 4625 kg (omloppsstation: 3625 kg, automatisk Mars-station: 355 kg) |
| Orbitala element | |
| Excentricitet | 0,95548 |
| Humör | 60° |
| Cirkulationsperiod | 12.79 dagar |
| apocenter | 211 400 km |
| pericenter | 1500 km |
| Landning på en himlakropp |
2 december 1971 13:52 UTC |
| Landningskoordinater | 45°S sh. 158°V / 45 ° S sh. 158°V d. / -45; -158 |
| Mediafiler på Wikimedia Commons | |
"Mars-3" är en sovjetisk automatisk interplanetär station (AMS) av den fjärde generationen av Mars rymdprogram . En av de tre AMC:erna i M-71-serien. Mars-3-stationen är designad för att utforska Mars både från omloppsbana och direkt på planetens yta. AMS bestod av en orbitalstation - en artificiell Marssatellit och ett nedstigningsfordon med en automatisk Marsstation.
Världens första mjuklandning av ett nedstigningsfordon på Mars och den enda inom sovjetisk kosmonautik [1] . Dataöverföringen från den automatiska Martian-stationen började 1,5 minuter efter att den landade på Mars yta, men stoppade efter 14,5 sekunder.
Specifikationer
- Mass AMC vid lansering: 4625 kg [2]
- Massa av orbitalstationen vid uppskjutning: 3625 kg
- Nedstigningsfordonets massa vid sjösättning: 1000 kg
- Massan av nedstigningsfordonet när det går in i Mars atmosfär: ingen information från auktoritativa källor
- Den automatiska Mars-stationens vikt: 355 kg (efter mjuklandning på Mars)
Konstruktion
AMS "Mars-3" utvecklades vid NPO uppkallad efter S. A. Lavochkin , den bestod av en orbitalstation - en konstgjord satellit och ett nedstigningsfordon med en automatisk Marsstation [2] . Layouten för AMS föreslogs av en ung designer V. A. Asyushkin. Styrsystemet, som väger 167 kg och en effektförbrukning på 800 watt, har utvecklats och tillverkats av Research Institute of Automation and Instrumentation .
Grunden för omloppsstationen var ett block av tankar i huvudframdrivningssystemet med cylindrisk form. Solpaneler , en starkt riktad parabolantenn, radiatorer för termiska kontrollsystem , ett nedstigningsfordon och ett instrumentfack fästes till detta block . Instrumentfacket var en toroidformad förseglad behållare som inrymde datorsystemet ombord , navigations- och orienteringssystem och andra system. Utanför fästes astronavigationsinstrument i instrumentfacket.
Den interplanetära stationen är utrustad med ett autonomt rymdnavigeringssystem som inte har några analoger i världen. Systemet använde en optisk goniometer. 7 timmar före ankomsten till Mars var det meningen att enheten skulle göra den första mätningen av Mars vinkelposition i förhållande till baskoordinatsystemet. Mätdata överfördes till styrsystemets omborddator, som beräknade den tredje korrektionsvektorn som var nödvändig för att överföra stationen till den nominella banan. Baserat på resultaten av beräkningarna utfärdade rymdfarkostens kontrollsystem kommandon för att utföra korrigeringen utan störningar från jorden. Prototypen av kontrollsystemet var datorsystemet för månskeppet, vars kärna var S-530 omborddator baserad på element av typen " Tropa " [3] .
Nedstigningsfordonet var en konisk aerodynamisk bromsskärm med en diameter på 3,2 meter och en vinkel på toppen av 120 grader, som täckte den automatiska Martian-stationen (nära sfärisk till formen). Ovanpå den automatiska Martian-stationen fästes en toroidformad instrument-fallskärmscontainer med fästband, som innehöll avgas- och huvudfallskärmarna, och de instrument som var nödvändiga för att säkerställa tillbakadragande, stabilisering, nedstigning från en omloppsbana nära Mars, bromsning och mjuk landning och en anslutningsram. På ramen finns en fastbränslemotor för att överföra nedstigningsfordonet från en flygande bana till en inkommande bana och enheter i ett autonomt styrsystem för att stabilisera nedstigningsfordonet efter att det har lossnat från omloppsstationen. En vimpel med bilden av Sovjetunionens statsemblem var också fixerad ombord på nedstigningsfordonet . Före flygningen steriliserades nedstigningsfordonet.
Den automatiska Martian-stationen inkluderade PrOP-M rover .
Flyg
Stationen lanserades från Baikonur Cosmodrome med hjälp av en Proton-K bärraket med ytterligare ett 4:e steg - övre steg D den 28 maj 1971 klockan 18:26:30 Moskva-tid . Till skillnad från föregående generations AMS, lanserades Mars-3 först i en mellanliggande omloppsbana av en artificiell satellit på jorden och överfördes sedan till en interplanetär bana av boosterblocket D.
Flygningen till Mars varade i mer än 6 månader. Den 8 juni och november 1971 genomfördes med framgång bankorrigeringar. Fram till ögonblicket av inflygning till Mars fortskred flygningen enligt programmet. Ankomsten av stationen till planeten sammanföll med en stor dammstorm . Dammstormen började den 22 september 1971 i den ljusa regionen Noachis på södra halvklotet. Senast den 29 september täckte tvåhundra grader i longitud från Ausonia till Thaumasia. 30 september stängde den södra polarmössan. En kraftig dammstorm hindrade vetenskapliga studier av Mars yta från de konstgjorda satelliterna " Mars-2 ", "Mars-3", " Mariner-9 ". Det var inte förrän den 10 januari 1972 som dammstormen upphörde och Mars fick ett normalt utseende.
Den 2 december 1971 genomfördes den tredje bankorrigeringen. Korrigeringen utfördes med hjälp av automation ombord utan användning av markanläggningar. Stationens autonoma astroorienteringssystem säkerställde dess orientering och bestämde stationens position i förhållande till Mars. De erhållna uppgifterna matades automatiskt in i den elektroniska omborddatorn, som beräknade storleken och riktningen för den korrigerande pulsen och utfärdade de nödvändiga kommandona för korrigeringen. Efter den tredje korrigeringen gick stationen in i en bana som passerade på ett avstånd av 1500 km från Mars yta.
Mars 3-landaren gjorde världens första mjuklandning på Mars den 2 december 1971. Landningen började efter den tredje korrigeringen av den interplanetära flygbanan och separation av nedstigningsfordonet från orbitalstationen. Före separationen var Mars-3-stationen orienterad så att nedstigningsfordonet efter separationen kunde röra sig i den riktning som krävs. Separationen ägde rum klockan 12:14 Moskva-tid den 2 december, när AMS flög upp till planeten, innan omloppsstationen bromsade in och flyttade in i en Mars-satellits omloppsbana. Efter 15 minuter aktiverades den fasta drivmedelsmotorn i nedstigningsfordonets övergång från förbiflygningsbanan till banan för mötet med Mars. Efter att ha fått en extra hastighet lika med 120 m/s (432 km/h), styrde nedstigningsfordonet till den beräknade punkten för inträde i atmosfären. Det fackverksmonterade kontrollsystemet satte sedan ut nedstigningsfordonet med en konisk dragsköld framåt i färdriktningen för att säkerställa ett korrekt orienterat återinträde i planetens atmosfär. För att bibehålla nedstigningsfordonet i denna orientering under flygningen till planeten, utfördes gyroskopisk stabilisering. Anordningens spinning längs den längsgående axeln utfördes med användning av två små fasta drivmedelsmotorer installerade på bromsskärmens periferi. Fackverket med styrsystem och översättningsmotor, nu onödigt, skiljdes från nedstigningsfordonet.
Flygningen från separation till återinträde varade cirka 4,5 timmar. På kommando från programtidsanordningen slogs två andra fastdrivna motorer på, också placerade i bromsskärmens periferi, varefter rotationen av nedstigningsfordonet stannade. Klockan 16:44 kom nedstigningsfordonet in i atmosfären i en vinkel nära den beräknade, med en hastighet av cirka 5,8 km/s, och aerodynamisk inbromsning började. I slutet av den aerodynamiska bromssektionen, fortfarande vid överljudsflyghastighet, på kommando av överbelastningssensorn, med hjälp av en pulvermotor placerad på locket till pilotrännans utrymme, introducerades pilotrännan. Efter 1,5 kapades torusfallskärmsfacket med hjälp av en långsträckt laddning och den övre delen av facket (locket) togs bort från nedstigningsfordonet av en pilotränna. Omslaget introducerade i sin tur huvudfallskärmen med en revad kupol. Huvudfallskärmens linor var fästa vid ett gäng motorer med fasta drivmedel, som redan var fästa direkt på nedstigningsfordonet.
När enheten saktade ner till transonisk hastighet, vid signalen från tidsprogramanordningen, genomfördes en revning - huvudskärmtaken var helt öppen. Efter 1–2 s släpptes den aerodynamiska könen och radiohöjdmätarantennerna för mjuklandningssystemet öppnades. Under nedstigningen i fallskärm i flera minuter minskade rörelsehastigheten till cirka 60 m/s (216 km/h). På en höjd av 20-30 meter, på kommando av radiohöjdmätaren, slogs bromsmotorn på en mjuklandning på. Fallskärmen vid denna tidpunkt avleddes åt sidan av en annan raketmotor så att dess kupol inte skulle täcka den automatiska Martian-stationen. Efter en tid stängdes mjuklandningsmotorn av och nedstigningsfordonet, separerat från fallskärmsbehållaren, sjönk till ytan. Samtidigt styrdes en fallskärmscontainer med mjuklandningsmotor åt sidan med hjälp av motorer med låg dragkraft. Vid tidpunkten för landningen skyddade en tjock skumbeläggning stationen från stötbelastning. Landning utfördes mellan områdena Electris och Phaetontia. Landningspunktens koordinater 45° S. sh. 158°V / 45 / -45; -158° S sh. 158°V på den platta botten av den stora kratern Ptolemaios , väster om Reutov-kratern, och mellan de små kratrarna Belev och Tyuratam [4] .
Mjuklandning på Mars är ett komplext vetenskapligt och tekniskt problem. Under utvecklingen av Mars-3-stationen studerades reliefen av Mars yta dåligt, det fanns mycket lite information om jorden. Dessutom är atmosfären mycket sällsynt, starka vindar är möjliga. Utformningen av den aerodynamiska konen, fallskärmarna och motorn för mjuklandning valdes med hänsyn till drift i ett brett spektrum av möjliga nedstigningsförhållanden och egenskaperna hos Mars-atmosfären, och deras vikt är minimal.
Inom 1,5 minuter efter landning förberedde den automatiska Martian-stationen sig för arbete och började sedan sända ett panorama av den omgivande ytan, men efter 14,5 sekunder avbröt sändningen. AMS sände endast de första 79 raderna av foto-tv-signalen (höger kant av panoramat). Den resulterande bilden var kaotiskt arrangerade vita, gråa och svarta ränder, på vilka inte en enda detalj kunde avslöjas.
Därefter antogs olika orsaker till den plötsliga avslutningen av signalen från ytan: en farlig horisontell hastighet under landning (Mars-3 kom in i atmosfären under en planetarisk dammstorm, när vindhastigheten nära ytan, enligt Mariner-9, var mer än 140 meter per sekund [5] ), koronaurladdning i sändarantennerna på grund av en kraftig dammstorm [6] , skada på batteriet.
Omloppsstationen, efter separeringen av nedstigningsfordonet, utförde retardation den 2 december 1971 och gick in i en omloppsbana av en artificiell Mars-satellit med en omloppstid på 12 dagar 16 timmar 3 minuter (en omloppsbana med en omloppsperiod 25 timmar planerades). Det finns ingen information från auktoritativa källor om skälen till att gå in i en off-design bana. Därefter antogs olika orsaker: otillräckligt testad programvara, därför visade sig motorns drifttid under bromsning vara mindre än den beräknade, ökad bränsleförbrukning under banakorrigeringar orsakade av onormal drift av bärraketen.
Den 23 augusti 1972 meddelade TASS slutförandet av flygprogrammet. "Stationen har genomfört ett omfattande program för utforskning av Mars i mer än 8 månader. Under denna tid gjorde stationen 20 varv runt planeten. AMS fortsatte forskningen fram till uttömningen av kväve i orienterings- och stabiliseringssystemet.
År 2002 publicerades en artikel i tidskriften Space Research, där följande uttalades om Mars-3:s arbete i omloppsbana nära Mars: ”Infraröd radiometri, fotometri, mätningar av atmosfärens sammansättning, magnetfält och plasma genomfördes under fyra månader” [7 ] .
Utvecklarna av foto-tv-installationen (FTU) använde fel modell av Mars, på grund av vilken fel exponeringar valdes. Bilderna blev överexponerade, nästan helt oanvändbara. Efter flera serier av bilder (var och en med 12 ramar) användes inte foto-tv-installationen [2] .
Patensbedömningsenhet
PrOP-M är världens första rover. Syfte - mätning av markdensitet. Under loppet av fem år arbetade 150 personer på enheten på VNIITransmash , under ledning av designern Alexander Leonovich Kemurdzhian . Samma PrOP-M rovers var en del av de automatiska Mars-stationerna som levererades till ytan av Mars 1971 av nedstigningsfordon från de sovjetiska interplanetära stationerna Mars-2 och Mars-3. Mars 2-landaren kraschade vid landning. Mars 3-landaren gjorde en mjuklandning den 2 december 1971, men signalen från Mars-stationen försvann efter 14,5 sekunder. Information från rovern mottogs inte.
Hitta en landningsplats
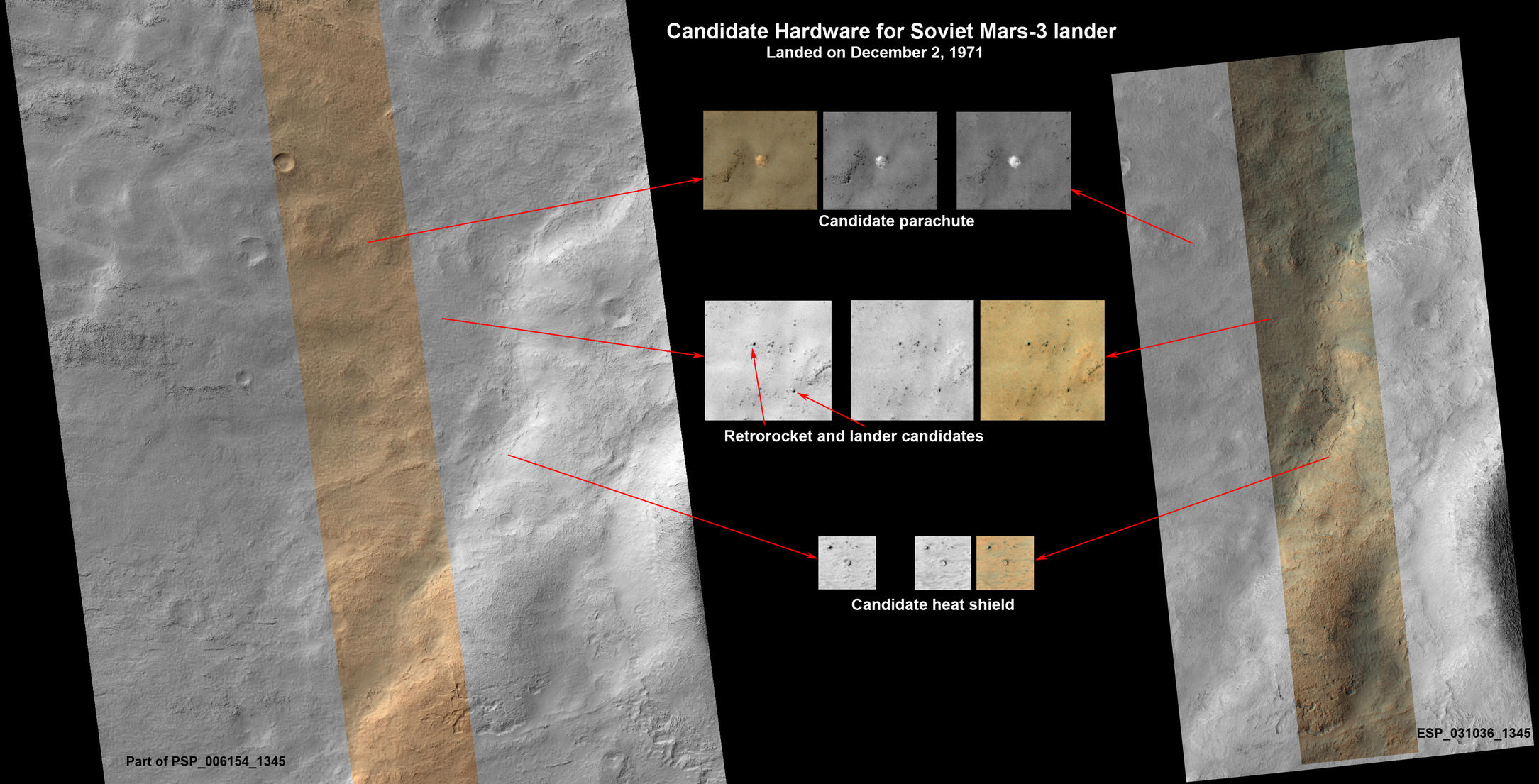
Som en del av flygprogrammet Mars Reconnaissance Orbiter gjordes försök att hitta landningsplatsen för Mars-3-apparaten, tillsammans med sökandet efter andra Mars automatiska stationer som lanserades av mänskligheten på 1900-talet. Under lång tid kunde stationen inte hittas i de förväntade landningskoordinaterna. Under 2012-2013 granskade och analyserade rymdentusiaster högupplösta bilder av stationens föreslagna landningszon, som togs 2007 av satelliten Mars Reconnaissance Orbiter [8] . Som ett resultat identifierades föremål som är delar av Mars-3 nedstigningsfordon. Bilderna identifierade en automatisk Mars-station, en fallskärm, en mjuklandningsmotor och en aerodynamisk dragskärm. I deras sökande fick de hjälp av specialister från NASA , GEOKHI , RKS , NPO dem. Lavochkin [1] [9] [10] [11]
Jämförelse med AMS Mariner 9
- Den termiska strålningen av jorden, genom vilken dess struktur bestämdes, studerades inte bara i infraröd, utan (till skillnad från Mariner-9) och i radioområdet [12] .
- Globala fotometriska profiler av Mars har erhållits i många spektralområden. Mariner 9 utförde inte sådana mätningar [12] .
- Vattenhalten i atmosfären bestämdes. Mättekniken använde det område av spektrumet där reflekterad solstrålning dominerar, snarare än termisk strålning, och bandets intensitet är nästan oberoende av den vertikala temperaturfördelningen. En sådan teknik är i princip mer perfekt än tekniken som används på Mariner-9 [12] .
Landningsplatser för robotstationer på Mars

![]()
![]()
Se även
- " Mars 1971C " är en sovjetisk automatisk interplanetär station av fjärde generationen från M-71-serien, designad för att utforska Mars från en konstgjord satellitbana.
- " Mars-2 " är en fjärde generationens sovjetisk AMS från M-71-serien, designad för att utforska Mars både från en konstgjord satellitbana och direkt på planetens yta.
Anteckningar
- ↑ 1 2 Den sovjetiska kosmonautikens stolthet hittades på Mars . Hämtad 26 juni 2020. Arkiverad från originalet 28 september 2016.
- ↑ 1 2 3 Mars -71 (Mars-2 och Mars-3) (otillgänglig länk) . NGO webbplats Lavochkin. Hämtad 17 februari 2014. Arkiverad från originalet 10 maj 2013.
- ↑ A. G. Glazkov Space Odyssey omborddator S-530 XXXVIII Akademiska läsningar om astronautik tillägnad minnet av akademikern S. P. Korolev och andra framstående vetenskapsmän - pionjärer inom rymdutforskning 2014 s. 115 Arkiverad 15 april 2015 på Wayback Machine .
- ↑ Namnen på två ryska städer dök upp på kartan över Mars | RIA Novosti Arkiverad 9 augusti 2013 på Wayback Machine .
- ↑ Carl Sagan. Kosmos: universums, livets och civilisationens utveckling / Per. från engelska. A.G. Sergeeva. - St Petersburg. : Amphora, 2008. - 368 sid. — (Dynastistiftelsens bibliotek). — ISBN 978-5367008296 .
- ↑ Perminov, 2018 .
- ↑ V. I. Moroz, V. T. Huntress, I. L. Shevalev. Planetexpeditioner under XX-talet // Rymdforskning: tidskrift. - 2002. - T. 40 , nr 5 . - S. 451-481 . — ISSN 0023-4206 .
- ↑ Vitaly Egorov. Hur vi sökte efter Mars-3 . Habrahabr (11 april 2013). Hämtad 11 april 2013. Arkiverad från originalet 17 april 2013.
- ↑ Guy Webster. NASA Mars Orbiter-bilder kan visa 1971 sovjetlandare (engelska) (länk ej tillgänglig) . NASA (11 april 2013). Hämtad 11 april 2013. Arkiverad från originalet 17 april 2013.
- ↑ NASA Mars Orbiter-bilder visar maj 1971 den sovjetiska landaren . Hämtad 2 januari 2020. Arkiverad från originalet 17 april 2019.
- ↑ 1 2 Webster, Guy NASA Mars Orbiter Images May Show 1971 Sovjet Lander . NASA (11 april 2013). Hämtad 12 april 2013. Arkiverad från originalet 29 juni 2017.
- ↑ 1 2 3 Nytt om Mars. — M .: Mir, 1974.
{kind=link}
{kind=link}
Litteratur
- V. Smirnov. Signal från Mars. Rapport från Center for Deep Space Communications . Sanning (8 december 1971). Hämtad: 12 december 2016.
- V. Moroz, L. Xanfomality. Fyra månader i Mars omloppsbana // Bulletin of the Academy of Sciences of the USSR: journal. - 1972. - S. 10-25 .
- Nytt om Mars. — M .: Mir, 1974.
- Bronshten V. A. Planet Mars. — M .: Nauka, 1977.
- VG Perminov. The Difficult Road to Mars : A Brief History of Mars Exploration in the Soviet Union: [ eng. ] . - Franklin Classics Trade Press, 2018. - 86 sid. — ISBN 0353299626 . — ISBN 978-0353299627 .
- Marov M.Ya, Huntress W.T. Sovjetiska robotar i solsystemet: teknologier och upptäckter: [ rus. ] . - M. : Fizmatlit, 2017. - 611 sid. — ISBN 978-5-9221-1741-8 .
Länkar
- Sovjetiskt anfall på Mars (1971 - "Mars-2" och "Mars-3"). på YouTube
- AMC-serien M-71 på webbplatsen för NPO dem. Lavochkin
- Mars 3 på NASA:s webbplats
- Inofficiell flash-film om Mars-3-flygning
- Kort beskrivning av designen och flygningen av Mars-2, Mars-3
- Beskrivning av designen och flygningen av Mars-2, Mars-3
- [bse.sci-lib.com/particle015942.html Bild av Mars-3 i Great Soviet Encyclopedia]
- Kan detta vara den sovjetiska landningssonden Mars-3?
- Hittade "Mars-3"?!, Sök efter sovjetiska landare på Mars
| Utforskning av Mars med rymdskepp | |
|---|---|
| Flygande | |
| Orbital | |
| Landning | |
| rovers | |
| Marshalls | |
| Planerad |
|
| Föreslog |
|
| Misslyckad | |
| Inställt |
|
| se även | |
| Aktiva rymdfarkoster är markerade med fet stil | |
| |
|---|---|
|
| |
| Fordon som avfyras av en raket är åtskilda av ett kommatecken ( , ), uppskjutningar är åtskilda av en interpunct ( · ). Bemannade flyg är markerade med fet stil. Misslyckade lanseringar är markerade med kursiv stil. | |